
A English
Torque and Couple Questions in English
Class 11 Physics · System of Particles and Rotational Motion · Torque and Couple
95+
Questions
English
Language
100%
With Solutions
Showing 45 of 95 questions in English
51
EasyMCQ
What is the torque of a force $\vec{F} = 3\hat{i} + 7\hat{j} + 4\hat{k}$ about the origin,if the force acts on a particle whose position vector is $\vec{r} = 2\hat{i} + 2\hat{j} + 1\hat{k}$?
A
$\hat{i} - 5\hat{j} + 8\hat{k}$
B
$2\hat{i} + 2\hat{j} + 2\hat{k}$
C
$\hat{i} + \hat{j} + \hat{k}$
D
$3\hat{i} + 2\hat{j} + 3\hat{k}$
Solution
(A) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$:
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = 2\hat{i} + 2\hat{j} + 1\hat{k}$ and $\vec{F} = 3\hat{i} + 7\hat{j} + 4\hat{k}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 2 & 1 \\ 3 & 7 & 4 \end{vmatrix}$
$\vec{\tau} = \hat{i}(2 \times 4 - 1 \times 7) - \hat{j}(2 \times 4 - 1 \times 3) + \hat{k}(2 \times 7 - 2 \times 3)$
$\vec{\tau} = \hat{i}(8 - 7) - \hat{j}(8 - 3) + \hat{k}(14 - 6)$
$\vec{\tau} = 1\hat{i} - 5\hat{j} + 8\hat{k}$.
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = 2\hat{i} + 2\hat{j} + 1\hat{k}$ and $\vec{F} = 3\hat{i} + 7\hat{j} + 4\hat{k}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 2 & 1 \\ 3 & 7 & 4 \end{vmatrix}$
$\vec{\tau} = \hat{i}(2 \times 4 - 1 \times 7) - \hat{j}(2 \times 4 - 1 \times 3) + \hat{k}(2 \times 7 - 2 \times 3)$
$\vec{\tau} = \hat{i}(8 - 7) - \hat{j}(8 - 3) + \hat{k}(14 - 6)$
$\vec{\tau} = 1\hat{i} - 5\hat{j} + 8\hat{k}$.
0 likes
View Solution52
DifficultMCQ
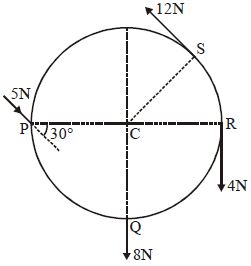
Four forces are applied to a wheel of radius $10\,cm$ as shown in the figure. The net torque produced by all these forces about $C$ is
A
$1.25\,Nm$ clockwise
B
$1.25\,Nm$ anticlockwise
C
$1.05\,Nm$ anticlockwise
D
$1.05\,Nm$ clockwise
Solution
(C) The radius of the wheel is $r = 10\,cm = 0.1\,m$.
$1$. Torque due to $12\,N$ force at $S$: This force is tangential,so $\tau_1 = F_1 \times r = 12 \times 0.1 = 1.2\,Nm$ (anticlockwise).
$2$. Torque due to $5\,N$ force at $P$: The perpendicular distance from $C$ to the line of action of the force is $r \sin(30^\circ) = 0.1 \times 0.5 = 0.05\,m$. Thus,$\tau_2 = 5 \times 0.05 = 0.25\,Nm$ (anticlockwise).
$3$. Torque due to $8\,N$ force at $Q$: The line of action passes through the center $C$,so $\tau_3 = 0$.
$4$. Torque due to $4\,N$ force at $R$: This force is tangential,so $\tau_4 = F_4 \times r = 4 \times 0.1 = 0.4\,Nm$ (clockwise).
Net torque $\tau_{net} = \tau_1 + \tau_2 - \tau_4 = 1.2 + 0.25 - 0.4 = 1.05\,Nm$ (anticlockwise).
$1$. Torque due to $12\,N$ force at $S$: This force is tangential,so $\tau_1 = F_1 \times r = 12 \times 0.1 = 1.2\,Nm$ (anticlockwise).
$2$. Torque due to $5\,N$ force at $P$: The perpendicular distance from $C$ to the line of action of the force is $r \sin(30^\circ) = 0.1 \times 0.5 = 0.05\,m$. Thus,$\tau_2 = 5 \times 0.05 = 0.25\,Nm$ (anticlockwise).
$3$. Torque due to $8\,N$ force at $Q$: The line of action passes through the center $C$,so $\tau_3 = 0$.
$4$. Torque due to $4\,N$ force at $R$: This force is tangential,so $\tau_4 = F_4 \times r = 4 \times 0.1 = 0.4\,Nm$ (clockwise).
Net torque $\tau_{net} = \tau_1 + \tau_2 - \tau_4 = 1.2 + 0.25 - 0.4 = 1.05\,Nm$ (anticlockwise).
0 likes
View Solution53
EasyMCQ
The torque acting on a body about the centre of mass due to the normal reaction:
A
Must be zero
B
Must be non-zero
C
May be non-zero on a stationary or moving body
D
Infinite
Solution
(C) The torque $\vec{\tau}$ about the centre of mass is given by $\vec{\tau} = \vec{r} \times \vec{N}$,where $\vec{r}$ is the position vector of the point of application of the normal force $\vec{N}$ relative to the centre of mass.
If the normal force acts directly through the centre of mass,the torque is zero.
However,in many physical situations,such as a block on an inclined plane or a body undergoing toppling,the normal force acts at a point shifted from the centre of mass.
In such cases,the position vector $\vec{r}$ is non-zero and not parallel to the normal force $\vec{N}$,resulting in a non-zero torque.
Therefore,the torque due to the normal reaction about the centre of mass may be non-zero depending on the point of application of the force.
If the normal force acts directly through the centre of mass,the torque is zero.
However,in many physical situations,such as a block on an inclined plane or a body undergoing toppling,the normal force acts at a point shifted from the centre of mass.
In such cases,the position vector $\vec{r}$ is non-zero and not parallel to the normal force $\vec{N}$,resulting in a non-zero torque.
Therefore,the torque due to the normal reaction about the centre of mass may be non-zero depending on the point of application of the force.
0 likes
View Solution54
MediumMCQ
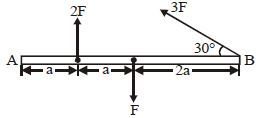
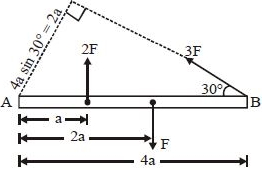
Three forces $F, 2F$ and $3F$ act on a rod $AB$ which is pivoted at $A$. The anticlockwise moments of forces $F, 2F$ and $3F$ about the pivot $A$ are respectively:
A
$+2Fa; -2Fa; +6Fa$
B
$-2Fa; +2Fa; +6Fa$
C
$-2Fa; -2Fa; -6Fa$
D
$+2Fa; +2Fa; +6Fa$
Solution
(B) The moment of a force about a point is given by $\tau = \pm F \cdot d$, where $d$ is the perpendicular distance from the pivot to the line of action of the force. By convention, anticlockwise moments are positive $(+)$ and clockwise moments are negative $(-)$.
$(i)$ For force $F$: The force $F$ acts downwards at a distance $2a$ from $A$. This creates a clockwise moment.
Moment $= -F \cdot (2a) = -2Fa$.
$(ii)$ For force $2F$: The force $2F$ acts upwards at a distance $a$ from $A$. This creates an anticlockwise moment.
Moment $= +(2F) \cdot a = +2Fa$.
$(iii)$ For force $3F$: The force $3F$ acts at $B$ (distance $4a$ from $A$) at an angle of $30^{\circ}$ to the rod. The perpendicular distance from $A$ is $d = 4a \sin 30^{\circ} = 4a \cdot (1/2) = 2a$. This force creates an anticlockwise moment.
Moment $= +(3F) \cdot (2a) = +6Fa$.
Thus, the moments are $-2Fa, +2Fa, +6Fa$.
$(i)$ For force $F$: The force $F$ acts downwards at a distance $2a$ from $A$. This creates a clockwise moment.
Moment $= -F \cdot (2a) = -2Fa$.
$(ii)$ For force $2F$: The force $2F$ acts upwards at a distance $a$ from $A$. This creates an anticlockwise moment.
Moment $= +(2F) \cdot a = +2Fa$.
$(iii)$ For force $3F$: The force $3F$ acts at $B$ (distance $4a$ from $A$) at an angle of $30^{\circ}$ to the rod. The perpendicular distance from $A$ is $d = 4a \sin 30^{\circ} = 4a \cdot (1/2) = 2a$. This force creates an anticlockwise moment.
Moment $= +(3F) \cdot (2a) = +6Fa$.
Thus, the moments are $-2Fa, +2Fa, +6Fa$.
0 likes
View Solution55
DifficultMCQ
Find the torque of a force $\vec F = -3\hat i + \hat j + 5\hat k$ acting at the point $\vec r = 7\hat i + 3\hat j + \hat k$ with respect to the origin.
A
$14\hat i - 38\hat j + 16\hat k$
B
$4\hat i + 4\hat j + 6\hat k$
C
$-14\hat i + 38\hat j - 16\hat k$
D
$-21\hat i + 3\hat j + 5\hat k$
Solution
(A) The torque $\vec{\tau}$ is defined as the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$:
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = 7\hat{i} + 3\hat{j} + \hat{k}$ and $\vec{F} = -3\hat{i} + \hat{j} + 5\hat{k}$,we calculate the cross product using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 7 & 3 & 1 \\ -3 & 1 & 5 \end{vmatrix}$
Expanding the determinant along the first row:
$\vec{\tau} = \hat{i}(3 \times 5 - 1 \times 1) - \hat{j}(7 \times 5 - 1 \times (-3)) + \hat{k}(7 \times 1 - 3 \times (-3))$
$\vec{\tau} = \hat{i}(15 - 1) - \hat{j}(35 + 3) + \hat{k}(7 + 9)$
$\vec{\tau} = 14\hat{i} - 38\hat{j} + 16\hat{k}$
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = 7\hat{i} + 3\hat{j} + \hat{k}$ and $\vec{F} = -3\hat{i} + \hat{j} + 5\hat{k}$,we calculate the cross product using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 7 & 3 & 1 \\ -3 & 1 & 5 \end{vmatrix}$
Expanding the determinant along the first row:
$\vec{\tau} = \hat{i}(3 \times 5 - 1 \times 1) - \hat{j}(7 \times 5 - 1 \times (-3)) + \hat{k}(7 \times 1 - 3 \times (-3))$
$\vec{\tau} = \hat{i}(15 - 1) - \hat{j}(35 + 3) + \hat{k}(7 + 9)$
$\vec{\tau} = 14\hat{i} - 38\hat{j} + 16\hat{k}$
0 likes
View Solution56
DifficultMCQ
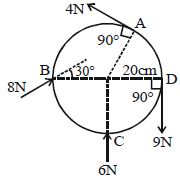
$A$ wheel of radius $20\, cm$ has forces applied to it as shown in the figure. The net torque produced by the forces $4\, N$ at $A$,$8\, N$ at $B$,$6\, N$ at $C$,and $9\, N$ at $D$ at the angles indicated is:
A
$5.4\, N-m$ (anticlockwise)
B
$1.8\, N-m$ (clockwise)
C
$2.0\, N-m$ (clockwise)
D
$5.4\, N-m$ (clockwise)
Solution
(B) The radius of the wheel is $r = 20\, cm = 0.2\, m$.
Torque $\tau = r \cdot F \cdot \sin \theta$,where $\theta$ is the angle between the position vector and the force vector.
$1$. For the $4\, N$ force at $A$: The force is tangential,so $\theta = 90^{\circ}$. It produces an anticlockwise torque: $\tau_A = 0.2 \times 4 \times \sin 90^{\circ} = 0.8\, N-m$ (anticlockwise).
$2$. For the $8\, N$ force at $B$: The angle between the radial line and the force is $30^{\circ}$. It produces a clockwise torque: $\tau_B = 0.2 \times 8 \times \sin 30^{\circ} = 1.6 \times 0.5 = 0.8\, N-m$ (clockwise).
$3$. For the $6\, N$ force at $C$: The force is directed towards the center,so $\theta = 0^{\circ}$. $\tau_C = 0.2 \times 6 \times \sin 0^{\circ} = 0\, N-m$.
$4$. For the $9\, N$ force at $D$: The force is tangential,so $\theta = 90^{\circ}$. It produces a clockwise torque: $\tau_D = 0.2 \times 9 \times \sin 90^{\circ} = 1.8\, N-m$ (clockwise).
Net torque $\tau_{net} = \tau_A - \tau_B - \tau_D = 0.8 - 0.8 - 1.8 = -1.8\, N-m$.
The negative sign indicates a clockwise direction. Thus,the net torque is $1.8\, N-m$ (clockwise).
Torque $\tau = r \cdot F \cdot \sin \theta$,where $\theta$ is the angle between the position vector and the force vector.
$1$. For the $4\, N$ force at $A$: The force is tangential,so $\theta = 90^{\circ}$. It produces an anticlockwise torque: $\tau_A = 0.2 \times 4 \times \sin 90^{\circ} = 0.8\, N-m$ (anticlockwise).
$2$. For the $8\, N$ force at $B$: The angle between the radial line and the force is $30^{\circ}$. It produces a clockwise torque: $\tau_B = 0.2 \times 8 \times \sin 30^{\circ} = 1.6 \times 0.5 = 0.8\, N-m$ (clockwise).
$3$. For the $6\, N$ force at $C$: The force is directed towards the center,so $\theta = 0^{\circ}$. $\tau_C = 0.2 \times 6 \times \sin 0^{\circ} = 0\, N-m$.
$4$. For the $9\, N$ force at $D$: The force is tangential,so $\theta = 90^{\circ}$. It produces a clockwise torque: $\tau_D = 0.2 \times 9 \times \sin 90^{\circ} = 1.8\, N-m$ (clockwise).
Net torque $\tau_{net} = \tau_A - \tau_B - \tau_D = 0.8 - 0.8 - 1.8 = -1.8\, N-m$.
The negative sign indicates a clockwise direction. Thus,the net torque is $1.8\, N-m$ (clockwise).
0 likes
View Solution57
DifficultMCQ
What is the torque of force $\vec F = 2\hat i - 3\hat j + 4\hat k$ acting at a point $\vec r = 3\hat i + 2\hat j + 3\hat k$ about the origin?
A
$6\hat i - 6\hat j + 12\hat k$
B
$-6\hat i + 6\hat j - 12\hat k$
C
$17\hat i - 6\hat j - 13\hat k$
D
$-17\hat i + 6\hat j + 13\hat k$
Solution
(C) The torque $\vec \tau$ is defined as the cross product of the position vector $\vec r$ and the force vector $\vec F$:
$\vec \tau = \vec r \times \vec F$
Given $\vec r = 3\hat i + 2\hat j + 3\hat k$ and $\vec F = 2\hat i - 3\hat j + 4\hat k$,we calculate the determinant:
$\vec \tau = \begin{vmatrix} \hat i & \hat j & \hat k \\ 3 & 2 & 3 \\ 2 & -3 & 4 \end{vmatrix}$
Expanding the determinant:
$\vec \tau = \hat i(2 \times 4 - 3 \times (-3)) - \hat j(3 \times 4 - 3 \times 2) + \hat k(3 \times (-3) - 2 \times 2)$
$\vec \tau = \hat i(8 + 9) - \hat j(12 - 6) + \hat k(-9 - 4)$
$\vec \tau = 17\hat i - 6\hat j - 13\hat k$
$\vec \tau = \vec r \times \vec F$
Given $\vec r = 3\hat i + 2\hat j + 3\hat k$ and $\vec F = 2\hat i - 3\hat j + 4\hat k$,we calculate the determinant:
$\vec \tau = \begin{vmatrix} \hat i & \hat j & \hat k \\ 3 & 2 & 3 \\ 2 & -3 & 4 \end{vmatrix}$
Expanding the determinant:
$\vec \tau = \hat i(2 \times 4 - 3 \times (-3)) - \hat j(3 \times 4 - 3 \times 2) + \hat k(3 \times (-3) - 2 \times 2)$
$\vec \tau = \hat i(8 + 9) - \hat j(12 - 6) + \hat k(-9 - 4)$
$\vec \tau = 17\hat i - 6\hat j - 13\hat k$
0 likes
View Solution58
EasyMCQ
Find the torque of a force $\vec{F} = 7 \hat{i} + 3 \hat{j} - 5 \hat{k}$ about the origin. The force acts on a particle whose position vector is $\vec{r} = \hat{i} - \hat{j} + \hat{k}$.
A
$2 \hat{i} + 12 \hat{j} + 10 \hat{k}$
B
$2 \hat{i} - 12 \hat{j} + 10 \hat{k}$
C
$2 \hat{i} + 12 \hat{j} - 10 \hat{k}$
D
$-2 \hat{i} + 12 \hat{j} + 10 \hat{k}$
Solution
(A) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$ as $\vec{\tau} = \vec{r} \times \vec{F}$.
Given $\vec{r} = \hat{i} - \hat{j} + \hat{k}$ and $\vec{F} = 7 \hat{i} + 3 \hat{j} - 5 \hat{k}$.
Using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & -1 & 1 \\ 7 & 3 & -5 \end{vmatrix}$
$\vec{\tau} = \hat{i}((-1)(-5) - (1)(3)) - \hat{j}((1)(-5) - (1)(7)) + \hat{k}((1)(3) - (-1)(7))$
$\vec{\tau} = \hat{i}(5 - 3) - \hat{j}(-5 - 7) + \hat{k}(3 + 7)$
$\vec{\tau} = 2 \hat{i} + 12 \hat{j} + 10 \hat{k}$.
Given $\vec{r} = \hat{i} - \hat{j} + \hat{k}$ and $\vec{F} = 7 \hat{i} + 3 \hat{j} - 5 \hat{k}$.
Using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & -1 & 1 \\ 7 & 3 & -5 \end{vmatrix}$
$\vec{\tau} = \hat{i}((-1)(-5) - (1)(3)) - \hat{j}((1)(-5) - (1)(7)) + \hat{k}((1)(3) - (-1)(7))$
$\vec{\tau} = \hat{i}(5 - 3) - \hat{j}(-5 - 7) + \hat{k}(3 + 7)$
$\vec{\tau} = 2 \hat{i} + 12 \hat{j} + 10 \hat{k}$.
0 likes
View Solution59
Easy
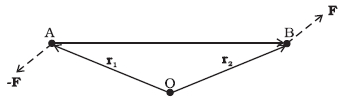
Show that the moment of a couple does not depend on the point about which you take the moments.
Solution
(N/A) Consider a couple acting on a rigid body as shown in the figure. The forces $F$ and $-F$ act respectively at points $B$ and $A$. These points have position vectors $r_1$ and $r_2$ with respect to the origin $O$.
Let us calculate the moments of the forces about the origin $O$.
The moment of the couple is the sum of the moments of the two forces forming the couple:
$\text{Moment} = r_1 \times (-F) + r_2 \times F$
$= r_2 \times F - r_1 \times F$
$= (r_2 - r_1) \times F$
From the triangle law of vector addition,we have $r_1 + AB = r_2$,which implies $AB = r_2 - r_1$.
Substituting this into the expression for the moment,we get:
$\text{Moment} = AB \times F$
Since $AB$ is the vector representing the separation between the two forces,the moment of the couple depends only on the forces and their separation,not on the origin $O$ chosen to calculate the moments. Thus,the moment of a couple is independent of the point about which the moments are taken.
Let us calculate the moments of the forces about the origin $O$.
The moment of the couple is the sum of the moments of the two forces forming the couple:
$\text{Moment} = r_1 \times (-F) + r_2 \times F$
$= r_2 \times F - r_1 \times F$
$= (r_2 - r_1) \times F$
From the triangle law of vector addition,we have $r_1 + AB = r_2$,which implies $AB = r_2 - r_1$.
Substituting this into the expression for the moment,we get:
$\text{Moment} = AB \times F$
Since $AB$ is the vector representing the separation between the two forces,the moment of the couple depends only on the forces and their separation,not on the origin $O$ chosen to calculate the moments. Thus,the moment of a couple is independent of the point about which the moments are taken.
0 likes
View Solution60
Difficult
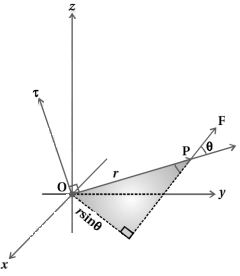
What is torque? Explain the torque acting on a particle.
Solution
(N/A) The role of torque in rotational motion is similar to the role of force in translational motion.
Consider a force $\vec{F}$ acting on a particle $P$ having a position vector $\vec{r}$ with respect to the origin $O$. The angle between $\vec{r}$ and $\vec{F}$ is $\theta$. The vector product of $\vec{r}$ and $\vec{F}$ is defined as the torque $\vec{\tau}$ acting on the particle with respect to the origin $O$.
$\therefore \vec{\tau} = \vec{r} \times \vec{F}$
The magnitude of torque is given by:
$\tau = r F \sin \theta$
where $|\vec{r}| = r$ and $|\vec{F}| = F$.
Since $\tau = r F \sin \theta$,we can rewrite this as:
$\tau = (r \sin \theta) F = r_{\perp} F$
where $r_{\perp} = r \sin \theta$ is the perpendicular distance of the line of action of the force from the origin.
Alternatively:
$\tau = r (F \sin \theta) = r F_{\perp}$
where $F_{\perp} = F \sin \theta$ is the component of the force perpendicular to the position vector.
Thus,torque is the moment of force with respect to point $O$.
Consider a force $\vec{F}$ acting on a particle $P$ having a position vector $\vec{r}$ with respect to the origin $O$. The angle between $\vec{r}$ and $\vec{F}$ is $\theta$. The vector product of $\vec{r}$ and $\vec{F}$ is defined as the torque $\vec{\tau}$ acting on the particle with respect to the origin $O$.
$\therefore \vec{\tau} = \vec{r} \times \vec{F}$
The magnitude of torque is given by:
$\tau = r F \sin \theta$
where $|\vec{r}| = r$ and $|\vec{F}| = F$.
Since $\tau = r F \sin \theta$,we can rewrite this as:
$\tau = (r \sin \theta) F = r_{\perp} F$
where $r_{\perp} = r \sin \theta$ is the perpendicular distance of the line of action of the force from the origin.
Alternatively:
$\tau = r (F \sin \theta) = r F_{\perp}$
where $F_{\perp} = F \sin \theta$ is the component of the force perpendicular to the position vector.
Thus,torque is the moment of force with respect to point $O$.
0 likes
View Solution61
Medium
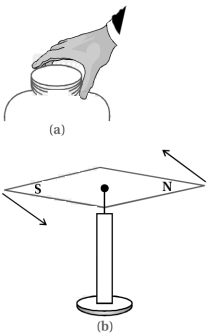
What is a couple? Give its illustrations.
Solution
(N/A) couple is a pair of equal and opposite forces acting on a body with different lines of action. $A$ couple produces rotation without translation.
Illustration $1$:
As shown in figure $(a)$,when we open the lid of a bottle by turning it,our fingers apply a couple to the lid. The lid is in translational equilibrium (net force is zero) but not in rotational equilibrium.
Illustration $2$:
As shown in figure $(b)$,the Earth's magnetic field exerts equal and opposite forces on the poles of a compass needle. The force on the North pole is towards the north,and the force on the South pole is towards the south.
When the needle is not aligned in the North-South direction,the lines of action of these two forces are different. Hence,a couple acts on the needle due to the Earth's magnetic field,causing it to undergo rotational motion without translational motion.
Illustration $1$:
As shown in figure $(a)$,when we open the lid of a bottle by turning it,our fingers apply a couple to the lid. The lid is in translational equilibrium (net force is zero) but not in rotational equilibrium.
Illustration $2$:
As shown in figure $(b)$,the Earth's magnetic field exerts equal and opposite forces on the poles of a compass needle. The force on the North pole is towards the north,and the force on the South pole is towards the south.
When the needle is not aligned in the North-South direction,the lines of action of these two forces are different. Hence,a couple acts on the needle due to the Earth's magnetic field,causing it to undergo rotational motion without translational motion.
0 likes
View Solution62
EasyMCQ
Which type of motion exists due to the moment of force (couple)?
A
Translational motion
B
Rotational motion
C
Vibrational motion
D
Rectilinear motion
Solution
(B) couple is defined as a pair of two equal and opposite forces acting at different points on a rigid body.
Since the net force acting on the body is zero $(F_{net} = F - F = 0)$,there is no translational motion.
However,the two forces produce a net torque about any point,which causes the body to rotate.
Therefore,a couple produces pure rotational motion.
Since the net force acting on the body is zero $(F_{net} = F - F = 0)$,there is no translational motion.
However,the two forces produce a net torque about any point,which causes the body to rotate.
Therefore,a couple produces pure rotational motion.
0 likes
View Solution63
Medium
Which factors should be considered for the calculation of torque,and which should not?
Solution
(N/A) The role of moment of inertia and torque in the rotational motion of a rigid body is analogous to the role of mass and force in translational motion.
In the rotational motion of a rigid body,only the components of torque parallel to the fixed axis of rotation should be considered,as these components are responsible for the rotation of the body relative to that axis.
The components of torque perpendicular to the axis of rotation tend to rotate the axis itself from its position. To cancel the effect of these perpendicular components,an equal and opposite reaction torque is generated by the supports,keeping the axis steady. Therefore,the perpendicular components of torque are not considered in the calculation of rotational motion about a fixed axis.
In summary,for the calculation of torque about a fixed axis:
$(1)$ We consider only those forces that lie in planes perpendicular to the axis.
$(2)$ We consider only those components of the position vectors that are perpendicular to the axis.
In the rotational motion of a rigid body,only the components of torque parallel to the fixed axis of rotation should be considered,as these components are responsible for the rotation of the body relative to that axis.
The components of torque perpendicular to the axis of rotation tend to rotate the axis itself from its position. To cancel the effect of these perpendicular components,an equal and opposite reaction torque is generated by the supports,keeping the axis steady. Therefore,the perpendicular components of torque are not considered in the calculation of rotational motion about a fixed axis.
In summary,for the calculation of torque about a fixed axis:
$(1)$ We consider only those forces that lie in planes perpendicular to the axis.
$(2)$ We consider only those components of the position vectors that are perpendicular to the axis.
0 likes
View Solution64
MediumMCQ
Which forces are needed for the rotational motion about a fixed axis?
A
$A$ force acting along the axis of rotation.
B
$A$ force whose line of action does not intersect the axis of rotation.
C
$A$ force whose line of action passes through the axis of rotation.
D
No force is required.
Solution
(B) For an object to undergo rotational motion about a fixed axis, it must experience a torque $(\tau)$.
Torque is defined as $\vec{\tau} = \vec{r} \times \vec{F}$, where $\vec{r}$ is the position vector from the axis of rotation to the point of application of the force, and $\vec{F}$ is the applied force.
If the line of action of the force passes through the axis of rotation, the perpendicular distance (lever arm) is zero, resulting in zero torque.
Therefore, to produce rotational motion, the force must have a line of action that does not intersect the axis of rotation, ensuring a non-zero torque is applied.
Torque is defined as $\vec{\tau} = \vec{r} \times \vec{F}$, where $\vec{r}$ is the position vector from the axis of rotation to the point of application of the force, and $\vec{F}$ is the applied force.
If the line of action of the force passes through the axis of rotation, the perpendicular distance (lever arm) is zero, resulting in zero torque.
Therefore, to produce rotational motion, the force must have a line of action that does not intersect the axis of rotation, ensuring a non-zero torque is applied.
0 likes
View Solution65
MediumMCQ
Why are the components of position vectors along the axis of rotation not needed for determining the torque in a rigid body?
A
Because they are parallel to the axis of rotation.
B
Because they do not contribute to the cross product.
C
Because the torque is defined only by the perpendicular distance.
D
All of the above.
Solution
(A) The torque $\vec{\tau}$ is defined as the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$,given by $\vec{\tau} = \vec{r} \times \vec{F}$.
When calculating the torque about a specific axis,we consider the component of the position vector $\vec{r}$ that is perpendicular to the axis of rotation.
Any component of the position vector $\vec{r}$ that lies along the axis of rotation is parallel to the axis.
Since the cross product of any vector with a vector parallel to the axis of rotation results in a component that is perpendicular to the axis,the parallel components of $\vec{r}$ do not contribute to the torque component along that axis.
Therefore,only the perpendicular components of the position vector are relevant for determining the torque about a given axis.
When calculating the torque about a specific axis,we consider the component of the position vector $\vec{r}$ that is perpendicular to the axis of rotation.
Any component of the position vector $\vec{r}$ that lies along the axis of rotation is parallel to the axis.
Since the cross product of any vector with a vector parallel to the axis of rotation results in a component that is perpendicular to the axis,the parallel components of $\vec{r}$ do not contribute to the torque component along that axis.
Therefore,only the perpendicular components of the position vector are relevant for determining the torque about a given axis.
0 likes
View Solution66
MediumMCQ
Which physical quantity plays the same role in rotational motion as force does in linear motion?
A
Moment of inertia
B
Angular momentum
C
Torque
D
Angular velocity
Solution
(C) In linear motion,force $(F)$ is responsible for changing the state of motion of an object,as described by Newton's second law $(F = ma)$.
In rotational motion,the physical quantity that plays an analogous role to force is torque $(\tau)$.
Torque is defined as the rotational equivalent of force and is responsible for changing the angular state of motion of an object,given by the relation $\tau = I\alpha$,where $I$ is the moment of inertia and $\alpha$ is the angular acceleration.
In rotational motion,the physical quantity that plays an analogous role to force is torque $(\tau)$.
Torque is defined as the rotational equivalent of force and is responsible for changing the angular state of motion of an object,given by the relation $\tau = I\alpha$,where $I$ is the moment of inertia and $\alpha$ is the angular acceleration.
0 likes
View Solution67
EasyMCQ
How is the direction of torque determined?
A
By the direction of force
B
By the direction of position vector
C
By the right-hand screw rule
D
By the left-hand rule
Solution
(C) The direction of torque $\vec{\tau} = \vec{r} \times \vec{F}$ is determined by the right-hand screw rule.
If we rotate a right-handed screw from the direction of the position vector $\vec{r}$ towards the direction of the force vector $\vec{F}$ through the smaller angle,the direction in which the screw advances gives the direction of the torque vector.
Alternatively,it is perpendicular to the plane containing both $\vec{r}$ and $\vec{F}$.
If we rotate a right-handed screw from the direction of the position vector $\vec{r}$ towards the direction of the force vector $\vec{F}$ through the smaller angle,the direction in which the screw advances gives the direction of the torque vector.
Alternatively,it is perpendicular to the plane containing both $\vec{r}$ and $\vec{F}$.
0 likes
View Solution68
EasyMCQ
Which component of torque is responsible for rotation about the $Z$-axis?
A
$X$-component
B
$Y$-component
C
$Z$-component
D
None of these
Solution
(C) For the rotation of a rigid body about the $Z$-axis,only the $Z$-component of the torque is responsible.
The torque vector is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
The $Z$-component of the torque is expressed as $\tau_{z} = (x F_{y} - y F_{x})$.
Therefore,the component responsible for rotation about the $Z$-axis is $\tau_{z}$.
The torque vector is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
The $Z$-component of the torque is expressed as $\tau_{z} = (x F_{y} - y F_{x})$.
Therefore,the component responsible for rotation about the $Z$-axis is $\tau_{z}$.
0 likes
View Solution69
Medium
Give the formula for the moment of a couple.
Solution
(N/A) The moment of a couple is defined as the product of the magnitude of one of the forces and the perpendicular distance between the lines of action of the two forces.
Formula: $\tau = F \times d$
Where:
$\tau$ is the moment of the couple,
$F$ is the magnitude of one of the forces,
$d$ is the perpendicular distance between the two forces.
Formula: $\tau = F \times d$
Where:
$\tau$ is the moment of the couple,
$F$ is the magnitude of one of the forces,
$d$ is the perpendicular distance between the two forces.
0 likes
View Solution70
MediumMCQ
What does torque measure in terms of producing rotational motion?
A
Force
B
Rotational effect of force
C
Linear momentum
D
Inertia
Solution
(B) Torque is defined as the rotational analogue of force. It measures the effectiveness of a force in changing the rotational state of an object about an axis. Mathematically,it is the cross product of the position vector and the force vector,given by $\vec{\tau} = \vec{r} \times \vec{F}$. Therefore,it represents the rotational effect of force.
0 likes
View Solution71
EasyMCQ
Why is the handle of a screwdriver made long to rotate a screw?
A
To increase the force applied.
B
To increase the torque.
C
To decrease the friction.
D
To decrease the moment of inertia.
Solution
(B) The torque $\tau$ is given by the formula $\tau = \vec{r} \times \vec{F}$,where $\vec{r}$ is the position vector (length of the handle) and $\vec{F}$ is the applied force.
By increasing the length of the handle,the magnitude of the position vector $\vec{r}$ increases.
Since $\tau \propto r$,increasing the length of the handle increases the torque applied to the screw.
This makes it easier to rotate the screw with less effort.
By increasing the length of the handle,the magnitude of the position vector $\vec{r}$ increases.
Since $\tau \propto r$,increasing the length of the handle increases the torque applied to the screw.
This makes it easier to rotate the screw with less effort.
0 likes
View Solution72
MediumMCQ
Why is the handle of a door or window placed at the end opposite to the hinged side?
A
To increase the force applied.
B
To increase the torque for a given force.
C
To decrease the moment of inertia.
D
To reduce the friction at the hinges.
Solution
(B) The torque $\tau$ is given by the formula $\tau = \vec{r} \times \vec{F}$,where $\vec{r}$ is the position vector from the axis of rotation (hinge) to the point where the force $\vec{F}$ is applied.
By placing the handle at the end opposite to the hinges,the distance $r$ is maximized.
Since $\tau = rF \sin \theta$,increasing $r$ results in a larger torque for the same amount of applied force.
This makes it easier to open or close the door or window with minimal effort.
By placing the handle at the end opposite to the hinges,the distance $r$ is maximized.
Since $\tau = rF \sin \theta$,increasing $r$ results in a larger torque for the same amount of applied force.
This makes it easier to open or close the door or window with minimal effort.
0 likes
View Solution73
MediumMCQ
The vector sum of a system of non-collinear forces acting on a rigid body is given to be nonzero. If the vector sum of all the torques due to the system of forces about a certain point is found to be zero,does this mean that it is necessarily zero about any arbitrary point?
A
Yes
B
No
C
Depends on the body
D
Only if the body is in equilibrium
Solution
(B) No,it is not necessarily zero about any arbitrary point.
The torque $\vec{\tau}$ about a point $P$ is given by $\vec{\tau}_P = \sum (\vec{r}_i - \vec{r}_P) \times \vec{F}_i$.
If we shift the point to $P'$,the new torque is $\vec{\tau}_{P'} = \sum (\vec{r}_i - \vec{r}_{P'}) \times \vec{F}_i = \sum (\vec{r}_i - \vec{r}_P + \vec{r}_P - \vec{r}_{P'}) \times \vec{F}_i$.
This simplifies to $\vec{\tau}_{P'} = \vec{\tau}_P + (\vec{r}_P - \vec{r}_{P'}) \times \sum \vec{F}_i$.
Since the net force $\sum \vec{F}_i \neq 0$,the torque $\vec{\tau}_{P'}$ will only be zero if the vector $(\vec{r}_P - \vec{r}_{P'})$ is parallel to the net force vector $\sum \vec{F}_i$.
The torque $\vec{\tau}$ about a point $P$ is given by $\vec{\tau}_P = \sum (\vec{r}_i - \vec{r}_P) \times \vec{F}_i$.
If we shift the point to $P'$,the new torque is $\vec{\tau}_{P'} = \sum (\vec{r}_i - \vec{r}_{P'}) \times \vec{F}_i = \sum (\vec{r}_i - \vec{r}_P + \vec{r}_P - \vec{r}_{P'}) \times \vec{F}_i$.
This simplifies to $\vec{\tau}_{P'} = \vec{\tau}_P + (\vec{r}_P - \vec{r}_{P'}) \times \sum \vec{F}_i$.
Since the net force $\sum \vec{F}_i \neq 0$,the torque $\vec{\tau}_{P'}$ will only be zero if the vector $(\vec{r}_P - \vec{r}_{P'})$ is parallel to the net force vector $\sum \vec{F}_i$.
0 likes
View Solution74
Medium
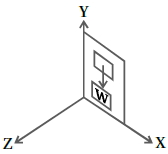
$A$ door is hinged at one end and is free to rotate about a vertical axis (figure). Does its weight cause any torque about this axis? Give a reason for your answer.
Solution
(N/A) No,the weight of the door does not cause any torque about the vertical axis of rotation.
The torque $\vec{\tau}$ is defined as the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$,given by $\vec{\tau} = \vec{r} \times \vec{F}$.
In this case,the vertical axis of rotation is the $Y$-axis. The weight $W$ of the door acts vertically downwards,which is along the negative $Y$-axis (i.e.,$\vec{F} = -W \hat{j}$).
The position vector $\vec{r}$ of any point on the door lies in the $XY$ plane. Since the force vector $\vec{F}$ is parallel to the axis of rotation ($Y$-axis),the line of action of the weight passes through the axis of rotation.
Mathematically,the perpendicular distance from the axis of rotation to the line of action of the force is zero. Therefore,the torque $\vec{\tau} = \vec{r} \times \vec{F} = 0$ about the vertical axis.
The torque $\vec{\tau}$ is defined as the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$,given by $\vec{\tau} = \vec{r} \times \vec{F}$.
In this case,the vertical axis of rotation is the $Y$-axis. The weight $W$ of the door acts vertically downwards,which is along the negative $Y$-axis (i.e.,$\vec{F} = -W \hat{j}$).
The position vector $\vec{r}$ of any point on the door lies in the $XY$ plane. Since the force vector $\vec{F}$ is parallel to the axis of rotation ($Y$-axis),the line of action of the weight passes through the axis of rotation.
Mathematically,the perpendicular distance from the axis of rotation to the line of action of the force is zero. Therefore,the torque $\vec{\tau} = \vec{r} \times \vec{F} = 0$ about the vertical axis.
0 likes
View Solution75
MediumMCQ
$A$ force $\overrightarrow{F} = (\hat{i} + 2\hat{j} + 3\hat{k}) \text{ N}$ acts at a point $\vec{r}_1 = (4\hat{i} + 3\hat{j} - \hat{k}) \text{ m}$. The magnitude of torque about the point $\vec{r}_2 = (\hat{i} + 2\hat{j} + \hat{k}) \text{ m}$ is $\sqrt{x} \text{ N-m}$. The value of $x$ is $........$
A
$200$
B
$195$
C
$150$
D
$175$
Solution
(B) The torque $\vec{\tau}$ about a point $\vec{r}_2$ is given by $\vec{\tau} = (\vec{r}_1 - \vec{r}_2) \times \vec{F}$.
First,calculate the position vector relative to the point of rotation:
$\vec{r} = \vec{r}_1 - \vec{r}_2 = (4\hat{i} + 3\hat{j} - \hat{k}) - (\hat{i} + 2\hat{j} + \hat{k}) = 3\hat{i} + \hat{j} - 2\hat{k}$.
Now,calculate the cross product $\vec{\tau} = \vec{r} \times \vec{F}$:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 3 & 1 & -2 \\ 1 & 2 & 3 \end{vmatrix}$
$= \hat{i}(1(3) - (-2)(2)) - \hat{j}(3(3) - (-2)(1)) + \hat{k}(3(2) - 1(1))$
$= \hat{i}(3 + 4) - \hat{j}(9 + 2) + \hat{k}(6 - 1) = 7\hat{i} - 11\hat{j} + 5\hat{k}$.
The magnitude of the torque is $|\vec{\tau}| = \sqrt{7^2 + (-11)^2 + 5^2} = \sqrt{49 + 121 + 25} = \sqrt{195}$.
Comparing this with $\sqrt{x}$,we get $x = 195$.
First,calculate the position vector relative to the point of rotation:
$\vec{r} = \vec{r}_1 - \vec{r}_2 = (4\hat{i} + 3\hat{j} - \hat{k}) - (\hat{i} + 2\hat{j} + \hat{k}) = 3\hat{i} + \hat{j} - 2\hat{k}$.
Now,calculate the cross product $\vec{\tau} = \vec{r} \times \vec{F}$:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 3 & 1 & -2 \\ 1 & 2 & 3 \end{vmatrix}$
$= \hat{i}(1(3) - (-2)(2)) - \hat{j}(3(3) - (-2)(1)) + \hat{k}(3(2) - 1(1))$
$= \hat{i}(3 + 4) - \hat{j}(9 + 2) + \hat{k}(6 - 1) = 7\hat{i} - 11\hat{j} + 5\hat{k}$.
The magnitude of the torque is $|\vec{\tau}| = \sqrt{7^2 + (-11)^2 + 5^2} = \sqrt{49 + 121 + 25} = \sqrt{195}$.
Comparing this with $\sqrt{x}$,we get $x = 195$.
0 likes
View Solution76
EasyMCQ
Find the torque about the origin when a force of $3 \hat{j} \text{ N}$ acts on a particle whose position vector is $2 \hat{k} \text{ m}$.
A
$6 \hat{k} \text{ Nm}$
B
$6 \hat{i} \text{ Nm}$
C
$6 \hat{j} \text{ Nm}$
D
$-6 \hat{i} \text{ Nm}$
Solution
(D) The torque $\vec{\tau}$ about the origin is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$.
Given: $\vec{F} = 3 \hat{j} \text{ N}$ and $\vec{r} = 2 \hat{k} \text{ m}$.
$\vec{\tau} = \vec{r} \times \vec{F} = (2 \hat{k}) \times (3 \hat{j})$.
Using the properties of unit vector cross products: $\hat{k} \times \hat{j} = -\hat{i}$.
Therefore,$\vec{\tau} = 6 (\hat{k} \times \hat{j}) = 6(-\hat{i}) = -6 \hat{i} \text{ Nm}$.
Given: $\vec{F} = 3 \hat{j} \text{ N}$ and $\vec{r} = 2 \hat{k} \text{ m}$.
$\vec{\tau} = \vec{r} \times \vec{F} = (2 \hat{k}) \times (3 \hat{j})$.
Using the properties of unit vector cross products: $\hat{k} \times \hat{j} = -\hat{i}$.
Therefore,$\vec{\tau} = 6 (\hat{k} \times \hat{j}) = 6(-\hat{i}) = -6 \hat{i} \text{ Nm}$.
0 likes
View Solution77
DifficultMCQ
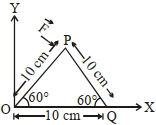
$A$ triangular plate is shown in the figure. $A$ force $\overrightarrow{F} = 4 \hat{i} - 3 \hat{j}$ is applied at point $P$. The torques at point $P$ with respect to point $O$ and point $Q$ are:
A
$-15-20 \sqrt{3}, 15-20 \sqrt{3}$
B
$15+20 \sqrt{3}, 15-20 \sqrt{3}$
C
$15-20 \sqrt{3}, 15+20 \sqrt{3}$
D
$-15+20 \sqrt{3}, 15+20 \sqrt{3}$
Solution
(D) The coordinates of point $P$ are $(5, 5 \sqrt{3})$ cm. The coordinates of point $O$ are $(0, 0)$ and point $Q$ are $(10, 0)$.
Given force $\overrightarrow{F} = 4 \hat{i} - 3 \hat{j}$.
Position vector of $P$ with respect to $O$ is $\overrightarrow{r}_1 = 5 \hat{i} + 5 \sqrt{3} \hat{j}$.
Torque about $O$ is $\vec{\tau}_O = \overrightarrow{r}_1 \times \overrightarrow{F} = (5 \hat{i} + 5 \sqrt{3} \hat{j}) \times (4 \hat{i} - 3 \hat{j}) = (-15 \hat{k} - 20 \sqrt{3} \hat{k}) = (-15 - 20 \sqrt{3}) \hat{k}$.
Position vector of $P$ with respect to $Q$ is $\overrightarrow{r}_2 = (5-10) \hat{i} + 5 \sqrt{3} \hat{j} = -5 \hat{i} + 5 \sqrt{3} \hat{j}$.
Torque about $Q$ is $\vec{\tau}_Q = \overrightarrow{r}_2 \times \overrightarrow{F} = (-5 \hat{i} + 5 \sqrt{3} \hat{j}) \times (4 \hat{i} - 3 \hat{j}) = (15 \hat{k} + 20 \sqrt{3} \hat{k}) = (15 + 20 \sqrt{3}) \hat{k}$.
Thus,the values are $(-15 - 20 \sqrt{3})$ and $(15 + 20 \sqrt{3})$.
Given force $\overrightarrow{F} = 4 \hat{i} - 3 \hat{j}$.
Position vector of $P$ with respect to $O$ is $\overrightarrow{r}_1 = 5 \hat{i} + 5 \sqrt{3} \hat{j}$.
Torque about $O$ is $\vec{\tau}_O = \overrightarrow{r}_1 \times \overrightarrow{F} = (5 \hat{i} + 5 \sqrt{3} \hat{j}) \times (4 \hat{i} - 3 \hat{j}) = (-15 \hat{k} - 20 \sqrt{3} \hat{k}) = (-15 - 20 \sqrt{3}) \hat{k}$.
Position vector of $P$ with respect to $Q$ is $\overrightarrow{r}_2 = (5-10) \hat{i} + 5 \sqrt{3} \hat{j} = -5 \hat{i} + 5 \sqrt{3} \hat{j}$.
Torque about $Q$ is $\vec{\tau}_Q = \overrightarrow{r}_2 \times \overrightarrow{F} = (-5 \hat{i} + 5 \sqrt{3} \hat{j}) \times (4 \hat{i} - 3 \hat{j}) = (15 \hat{k} + 20 \sqrt{3} \hat{k}) = (15 + 20 \sqrt{3}) \hat{k}$.
Thus,the values are $(-15 - 20 \sqrt{3})$ and $(15 + 20 \sqrt{3})$.
0 likes
View Solution78
MediumMCQ
$A$ force $\vec{F} = 4\hat{i} + 3\hat{j} + 4\hat{k}$ is applied at the intersection point of the plane $x = 2$ and the $x$-axis. The magnitude of the torque of this force about the point $(2, 3, 4)$ is .......... . (Round off to the nearest integer)
A
$16$
B
$20$
C
$25$
D
$12$
Solution
(B) The position vector $\vec{r}$ is the vector from the point of rotation $(2, 3, 4)$ to the point of application of the force.
The intersection of the plane $x = 2$ and the $x$-axis is the point $(2, 0, 0)$.
Thus,$\vec{r} = (2 - 2)\hat{i} + (0 - 3)\hat{j} + (0 - 4)\hat{k} = -3\hat{j} - 4\hat{k}$.
The force is $\vec{F} = 4\hat{i} + 3\hat{j} + 4\hat{k}$.
The torque $\vec{\tau}$ is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 0 & -3 & -4 \\ 4 & 3 & 4 \end{vmatrix}$.
$\vec{\tau} = \hat{i}(-12 - (-12)) - \hat{j}(0 - (-16)) + \hat{k}(0 - (-12))$.
$\vec{\tau} = 0\hat{i} - 16\hat{j} + 12\hat{k}$.
The magnitude of the torque is $|\vec{\tau}| = \sqrt{0^2 + (-16)^2 + 12^2} = \sqrt{256 + 144} = \sqrt{400} = 20$.
The intersection of the plane $x = 2$ and the $x$-axis is the point $(2, 0, 0)$.
Thus,$\vec{r} = (2 - 2)\hat{i} + (0 - 3)\hat{j} + (0 - 4)\hat{k} = -3\hat{j} - 4\hat{k}$.
The force is $\vec{F} = 4\hat{i} + 3\hat{j} + 4\hat{k}$.
The torque $\vec{\tau}$ is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 0 & -3 & -4 \\ 4 & 3 & 4 \end{vmatrix}$.
$\vec{\tau} = \hat{i}(-12 - (-12)) - \hat{j}(0 - (-16)) + \hat{k}(0 - (-12))$.
$\vec{\tau} = 0\hat{i} - 16\hat{j} + 12\hat{k}$.
The magnitude of the torque is $|\vec{\tau}| = \sqrt{0^2 + (-16)^2 + 12^2} = \sqrt{256 + 144} = \sqrt{400} = 20$.
0 likes
View Solution79
EasyMCQ
If force $\vec{F} = 3 \hat{i} + 4 \hat{j} - 2 \hat{k}$ acts on a particle having position vector $\vec{r} = 2 \hat{i} + \hat{j} + 2 \hat{k}$,then the torque about the origin will be:
A
$3 \hat{i} + 4 \hat{j} - 2 \hat{k}$
B
$-10 \hat{i} + 10 \hat{j} + 5 \hat{k}$
C
$10 \hat{i} + 5 \hat{j} - 10 \hat{k}$
D
$10 \hat{i} + \hat{j} - 5 \hat{k}$
Solution
(B) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$:
$\vec{\tau} = \vec{r} \times \vec{F}$
Using the determinant form for the cross product:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 1 & 2 \\ 3 & 4 & -2 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} [(1)(-2) - (2)(4)] - \hat{j} [(2)(-2) - (2)(3)] + \hat{k} [(2)(4) - (1)(3)]$
$\vec{\tau} = \hat{i} [-2 - 8] - \hat{j} [-4 - 6] + \hat{k} [8 - 3]$
$\vec{\tau} = -10 \hat{i} + 10 \hat{j} + 5 \hat{k}$
$\vec{\tau} = \vec{r} \times \vec{F}$
Using the determinant form for the cross product:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 1 & 2 \\ 3 & 4 & -2 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} [(1)(-2) - (2)(4)] - \hat{j} [(2)(-2) - (2)(3)] + \hat{k} [(2)(4) - (1)(3)]$
$\vec{\tau} = \hat{i} [-2 - 8] - \hat{j} [-4 - 6] + \hat{k} [8 - 3]$
$\vec{\tau} = -10 \hat{i} + 10 \hat{j} + 5 \hat{k}$
0 likes
View Solution80
EasyMCQ
The torque of a force $\vec{F} = 5 \hat{i} + 3 \hat{j} - 7 \hat{k}$ about the origin is $\vec{\tau}$. If the force acts on a particle whose position vector is $\vec{r} = 2 \hat{i} + 2 \hat{j} + \hat{k}$,then the value of $\vec{\tau}$ will be:
A
$11 \hat{i} + 19 \hat{j} - 4 \hat{k}$
B
$-11 \hat{i} + 9 \hat{j} - 16 \hat{k}$
C
$-17 \hat{i} + 19 \hat{j} - 4 \hat{k}$
D
$17 \hat{i} + 9 \hat{j} + 16 \hat{k}$
Solution
(C) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$:
$\vec{\tau} = \vec{r} \times \vec{F}$
Using the determinant form for the cross product:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 2 & 1 \\ 5 & 3 & -7 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} [(2)(-7) - (1)(3)] - \hat{j} [(2)(-7) - (1)(5)] + \hat{k} [(2)(3) - (2)(5)]$
$\vec{\tau} = \hat{i} [-14 - 3] - \hat{j} [-14 - 5] + \hat{k} [6 - 10]$
$\vec{\tau} = -17 \hat{i} + 19 \hat{j} - 4 \hat{k}$
$\vec{\tau} = \vec{r} \times \vec{F}$
Using the determinant form for the cross product:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 2 & 2 & 1 \\ 5 & 3 & -7 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} [(2)(-7) - (1)(3)] - \hat{j} [(2)(-7) - (1)(5)] + \hat{k} [(2)(3) - (2)(5)]$
$\vec{\tau} = \hat{i} [-14 - 3] - \hat{j} [-14 - 5] + \hat{k} [6 - 10]$
$\vec{\tau} = -17 \hat{i} + 19 \hat{j} - 4 \hat{k}$
0 likes
View Solution81
MediumMCQ
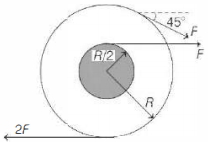
$A$ wheel of radius $R$ with an axle of radius $R/2$ is as shown in the figure. It is free to rotate about a frictionless axis through its centre and perpendicular to the page. Three forces are exerted as shown in the figure: a force $F$ at an angle of $45^{\circ}$ to the tangent of the outer rim,a force $F$ tangential to the inner axle,and a force $2F$ tangential to the outer rim. The magnitude of the net torque acting on the system is nearly ............. $FR$.
A
$3.5$
B
$3.2$
C
$2.5$
D
$1.5$
Solution
(B) The net torque $\tau_{\text{net}}$ is the sum of the torques produced by each force about the central axis.
$1$. Torque due to force $F$ at the outer rim (at $45^{\circ}$): The tangential component of this force is $F \cos(45^{\circ})$. The torque is $\tau_1 = R \cdot F \cos(45^{\circ}) = R \cdot F \cdot \frac{1}{\sqrt{2}} \approx 0.707 RF$.
$2$. Torque due to force $F$ at the inner axle: This force is applied tangentially at radius $R/2$. The torque is $\tau_2 = \frac{R}{2} \cdot F = 0.5 RF$.
$3$. Torque due to force $2F$ at the outer rim: This force is applied tangentially at radius $R$. The torque is $\tau_3 = R \cdot 2F = 2 RF$.
All these torques act in the same rotational sense (counter-clockwise). Therefore,the net torque is:
$\tau_{\text{net}} = \tau_1 + \tau_2 + \tau_3 = 0.707 RF + 0.5 RF + 2 RF = 3.207 RF$.
Rounding to the nearest value,the magnitude of the net torque is nearly $3.2 FR$.
$1$. Torque due to force $F$ at the outer rim (at $45^{\circ}$): The tangential component of this force is $F \cos(45^{\circ})$. The torque is $\tau_1 = R \cdot F \cos(45^{\circ}) = R \cdot F \cdot \frac{1}{\sqrt{2}} \approx 0.707 RF$.
$2$. Torque due to force $F$ at the inner axle: This force is applied tangentially at radius $R/2$. The torque is $\tau_2 = \frac{R}{2} \cdot F = 0.5 RF$.
$3$. Torque due to force $2F$ at the outer rim: This force is applied tangentially at radius $R$. The torque is $\tau_3 = R \cdot 2F = 2 RF$.
All these torques act in the same rotational sense (counter-clockwise). Therefore,the net torque is:
$\tau_{\text{net}} = \tau_1 + \tau_2 + \tau_3 = 0.707 RF + 0.5 RF + 2 RF = 3.207 RF$.
Rounding to the nearest value,the magnitude of the net torque is nearly $3.2 FR$.
0 likes
View Solution82
MediumMCQ
Moment of a force of magnitude $20 \, N$ acting along the positive $x$-direction at point $(3 \, m, 0, 0)$ about the point $(0, 2, 0)$ (in $N \cdot m$) is ...........
A
$20$
B
$60$
C
$40$
D
$30$
Solution
(C) The torque (moment of force) is given by the cross product of the position vector and the force vector: $\vec{\tau} = \vec{r} \times \vec{F}$.
Given,the force vector is $\vec{F} = 20 \hat{i} \, N$.
The position vector $\vec{r}$ of the point of application $(3, 0, 0)$ with respect to the point $(0, 2, 0)$ is $\vec{r} = (3 - 0) \hat{i} + (0 - 2) \hat{j} + (0 - 0) \hat{k} = (3 \hat{i} - 2 \hat{j}) \, m$.
Now,calculating the cross product:
$\vec{\tau} = (3 \hat{i} - 2 \hat{j}) \times (20 \hat{i})$
$\vec{\tau} = 3 \hat{i} \times 20 \hat{i} - 2 \hat{j} \times 20 \hat{i}$
Since $\hat{i} \times \hat{i} = 0$ and $\hat{j} \times \hat{i} = -\hat{k}$:
$\vec{\tau} = 0 - 40 (-\hat{k}) = 40 \hat{k} \, N \cdot m$.
The magnitude of the torque is $|\vec{\tau}| = 40 \, N \cdot m$.
Given,the force vector is $\vec{F} = 20 \hat{i} \, N$.
The position vector $\vec{r}$ of the point of application $(3, 0, 0)$ with respect to the point $(0, 2, 0)$ is $\vec{r} = (3 - 0) \hat{i} + (0 - 2) \hat{j} + (0 - 0) \hat{k} = (3 \hat{i} - 2 \hat{j}) \, m$.
Now,calculating the cross product:
$\vec{\tau} = (3 \hat{i} - 2 \hat{j}) \times (20 \hat{i})$
$\vec{\tau} = 3 \hat{i} \times 20 \hat{i} - 2 \hat{j} \times 20 \hat{i}$
Since $\hat{i} \times \hat{i} = 0$ and $\hat{j} \times \hat{i} = -\hat{k}$:
$\vec{\tau} = 0 - 40 (-\hat{k}) = 40 \hat{k} \, N \cdot m$.
The magnitude of the torque is $|\vec{\tau}| = 40 \, N \cdot m$.
0 likes
View Solution83
EasyMCQ
$A$ force $\vec{F}=(2 \hat{i}+3 \hat{j}-5 \hat{k}) \, N$ acts at a point $\vec{r}_1=(2 \hat{i}+4 \hat{j}+7 \hat{k}) \, m$. The torque of the force about the point $\vec{r}_2=(\hat{i}+2 \hat{j}+3 \hat{k}) \, m$ is ............. $N m$.
A
$(17 \hat{j}+5 \hat{k}-3 \hat{i}) \, N m$
B
$(2 \hat{i}+4 \hat{j}-6 \hat{k}) \, N m$
C
$(12 \hat{i}-5 \hat{j}+7 \hat{k}) \, N m$
D
$(13 \hat{j}-22 \hat{i}-\hat{k}) \, N m$
Solution
(D) The position vector $\vec{r}$ of the point of application relative to the point about which torque is calculated is given by $\vec{r} = \vec{r}_1 - \vec{r}_2$.
$\vec{r} = (2 \hat{i} + 4 \hat{j} + 7 \hat{k}) - (\hat{i} + 2 \hat{j} + 3 \hat{k}) = \hat{i} + 2 \hat{j} + 4 \hat{k} \, m$.
The torque $\vec{\tau}$ is defined as $\vec{\tau} = \vec{r} \times \vec{F}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 2 & 4 \\ 2 & 3 & -5 \end{vmatrix}$.
Calculating the determinant: $\vec{\tau} = \hat{i} [ (2)(-5) - (4)(3) ] - \hat{j} [ (1)(-5) - (4)(2) ] + \hat{k} [ (1)(3) - (2)(2) ]$.
$\vec{\tau} = \hat{i} [ -10 - 12 ] - \hat{j} [ -5 - 8 ] + \hat{k} [ 3 - 4 ]$.
$\vec{\tau} = -22 \hat{i} + 13 \hat{j} - \hat{k} \, N m$.
$\vec{r} = (2 \hat{i} + 4 \hat{j} + 7 \hat{k}) - (\hat{i} + 2 \hat{j} + 3 \hat{k}) = \hat{i} + 2 \hat{j} + 4 \hat{k} \, m$.
The torque $\vec{\tau}$ is defined as $\vec{\tau} = \vec{r} \times \vec{F}$.
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 2 & 4 \\ 2 & 3 & -5 \end{vmatrix}$.
Calculating the determinant: $\vec{\tau} = \hat{i} [ (2)(-5) - (4)(3) ] - \hat{j} [ (1)(-5) - (4)(2) ] + \hat{k} [ (1)(3) - (2)(2) ]$.
$\vec{\tau} = \hat{i} [ -10 - 12 ] - \hat{j} [ -5 - 8 ] + \hat{k} [ 3 - 4 ]$.
$\vec{\tau} = -22 \hat{i} + 13 \hat{j} - \hat{k} \, N m$.
0 likes
View Solution84
MediumMCQ
$A$ force of $-P \hat{k}$ acts on the origin of the coordinate system. The torque about the point $(2, -3)$ is $P(a \hat{i} + b \hat{j})$. If the ratio $\frac{a}{b} = \frac{x}{2}$,find the value of $x$.
A
$1$
B
$2$
C
$3$
D
$4$
Solution
(C) The torque $\vec{\tau}$ about a point is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
Here,the force $\vec{F} = -P \hat{k}$ acts at the origin $(0, 0, 0)$.
The position vector $\vec{r}$ of the origin with respect to the point $(2, -3)$ is $\vec{r} = (0 - 2)\hat{i} + (0 - (-3))\hat{j} = -2\hat{i} + 3\hat{j}$.
Now,calculate the cross product:
$\vec{\tau} = (-2\hat{i} + 3\hat{j}) \times (-P\hat{k})$
$\vec{\tau} = -P [(-2)(\hat{i} \times \hat{k}) + 3(\hat{j} \times \hat{k})]$
Since $\hat{i} \times \hat{k} = -\hat{j}$ and $\hat{j} \times \hat{k} = \hat{i}$,we get:
$\vec{\tau} = -P [(-2)(-\hat{j}) + 3(\hat{i})]$
$\vec{\tau} = -P [2\hat{j} + 3\hat{i}] = P(-3\hat{i} - 2\hat{j})$.
Comparing this with $P(a\hat{i} + b\hat{j})$,we get $a = -3$ and $b = -2$.
The ratio $\frac{a}{b} = \frac{-3}{-2} = \frac{3}{2}$.
Given $\frac{a}{b} = \frac{x}{2}$,we have $\frac{3}{2} = \frac{x}{2}$,which implies $x = 3$.
Here,the force $\vec{F} = -P \hat{k}$ acts at the origin $(0, 0, 0)$.
The position vector $\vec{r}$ of the origin with respect to the point $(2, -3)$ is $\vec{r} = (0 - 2)\hat{i} + (0 - (-3))\hat{j} = -2\hat{i} + 3\hat{j}$.
Now,calculate the cross product:
$\vec{\tau} = (-2\hat{i} + 3\hat{j}) \times (-P\hat{k})$
$\vec{\tau} = -P [(-2)(\hat{i} \times \hat{k}) + 3(\hat{j} \times \hat{k})]$
Since $\hat{i} \times \hat{k} = -\hat{j}$ and $\hat{j} \times \hat{k} = \hat{i}$,we get:
$\vec{\tau} = -P [(-2)(-\hat{j}) + 3(\hat{i})]$
$\vec{\tau} = -P [2\hat{j} + 3\hat{i}] = P(-3\hat{i} - 2\hat{j})$.
Comparing this with $P(a\hat{i} + b\hat{j})$,we get $a = -3$ and $b = -2$.
The ratio $\frac{a}{b} = \frac{-3}{-2} = \frac{3}{2}$.
Given $\frac{a}{b} = \frac{x}{2}$,we have $\frac{3}{2} = \frac{x}{2}$,which implies $x = 3$.
0 likes
View Solution85
MediumMCQ
The torque due to the force $\vec{F} = (2 \hat{i} + \hat{j} + 2 \hat{k})$ about the origin,acting on a particle whose position vector is $\vec{r} = (\hat{i} + \hat{j} + \hat{k})$,is:
A
$\hat{i} - \hat{j} + \hat{k}$
B
$\hat{i} + \hat{k}$
C
$\hat{i} - \hat{k}$
D
$\hat{j} - \hat{k}$
Solution
(C) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$.
$\vec{\tau} = \vec{r} \times \vec{F} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 1 & 1 \\ 2 & 1 & 2 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}(1 \times 2 - 1 \times 1) - \hat{j}(1 \times 2 - 1 \times 2) + \hat{k}(1 \times 1 - 1 \times 2)$
$\vec{\tau} = \hat{i}(2 - 1) - \hat{j}(2 - 2) + \hat{k}(1 - 2)$
$\vec{\tau} = \hat{i} - 0\hat{j} - \hat{k} = \hat{i} - \hat{k}$.
$\vec{\tau} = \vec{r} \times \vec{F} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 1 & 1 \\ 2 & 1 & 2 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}(1 \times 2 - 1 \times 1) - \hat{j}(1 \times 2 - 1 \times 2) + \hat{k}(1 \times 1 - 1 \times 2)$
$\vec{\tau} = \hat{i}(2 - 1) - \hat{j}(2 - 2) + \hat{k}(1 - 2)$
$\vec{\tau} = \hat{i} - 0\hat{j} - \hat{k} = \hat{i} - \hat{k}$.
0 likes
View Solution86
MediumMCQ
The coordinates of a particle with respect to origin in a given reference frame is $(1, 1, 1) \ m$. If a force of $\vec{F} = \hat{i} - \hat{j} + \hat{k} \ N$ acts on the particle,then the magnitude of the torque (with respect to origin) in the $z$-direction is . . . . . . .
A
$2$
B
$3$
C
$4$
D
$5$
Solution
(A) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$.
Given $\vec{r} = (1\hat{i} + 1\hat{j} + 1\hat{k}) \ m$ and $\vec{F} = (1\hat{i} - 1\hat{j} + 1\hat{k}) \ N$.
$\vec{\tau} = \vec{r} \times \vec{F} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 1 & 1 \\ 1 & -1 & 1 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}(1 - (-1)) - \hat{j}(1 - 1) + \hat{k}(-1 - 1)$
$\vec{\tau} = \hat{i}(2) - \hat{j}(0) + \hat{k}(-2)$
$\vec{\tau} = 2\hat{i} - 2\hat{k} \ N \cdot m$
The torque in the $z$-direction is the component associated with the $\hat{k}$ unit vector,which is $-2 \ N \cdot m$.
The magnitude of this component is $|-2| = 2 \ N \cdot m$.
Given $\vec{r} = (1\hat{i} + 1\hat{j} + 1\hat{k}) \ m$ and $\vec{F} = (1\hat{i} - 1\hat{j} + 1\hat{k}) \ N$.
$\vec{\tau} = \vec{r} \times \vec{F} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & 1 & 1 \\ 1 & -1 & 1 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}(1 - (-1)) - \hat{j}(1 - 1) + \hat{k}(-1 - 1)$
$\vec{\tau} = \hat{i}(2) - \hat{j}(0) + \hat{k}(-2)$
$\vec{\tau} = 2\hat{i} - 2\hat{k} \ N \cdot m$
The torque in the $z$-direction is the component associated with the $\hat{k}$ unit vector,which is $-2 \ N \cdot m$.
The magnitude of this component is $|-2| = 2 \ N \cdot m$.
0 likes
View Solution87
MediumMCQ
If force $\vec{F} = -3 \hat{i} + \hat{j} + 5 \hat{k}$ acts at a position vector $\vec{r} = 7 \hat{i} + 3 \hat{j} + \hat{k}$,then the torque $\vec{\tau}$ acting at that point is:
A
$(14 \hat{i} - 38 \hat{j} + 16 \hat{k})$
B
$(-14 \hat{i} + 34 \hat{j} - 16 \hat{k})$
C
$(21 \hat{i} + 4 \hat{j} + 4 \hat{k})$
D
$(4 \hat{i} + 4 \hat{j} + 6 \hat{k})$
Solution
(A) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$.
$\vec{\tau} = \vec{r} \times \vec{F}$
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 7 & 3 & 1 \\ -3 & 1 & 5 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} (3 \times 5 - 1 \times 1) - \hat{j} (7 \times 5 - 1 \times (-3)) + \hat{k} (7 \times 1 - 3 \times (-3))$
$\vec{\tau} = \hat{i} (15 - 1) - \hat{j} (35 + 3) + \hat{k} (7 + 9)$
$\vec{\tau} = 14 \hat{i} - 38 \hat{j} + 16 \hat{k}$
Thus,the correct option is $A$.
$\vec{\tau} = \vec{r} \times \vec{F}$
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 7 & 3 & 1 \\ -3 & 1 & 5 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i} (3 \times 5 - 1 \times 1) - \hat{j} (7 \times 5 - 1 \times (-3)) + \hat{k} (7 \times 1 - 3 \times (-3))$
$\vec{\tau} = \hat{i} (15 - 1) - \hat{j} (35 + 3) + \hat{k} (7 + 9)$
$\vec{\tau} = 14 \hat{i} - 38 \hat{j} + 16 \hat{k}$
Thus,the correct option is $A$.
0 likes
View Solution88
MediumMCQ
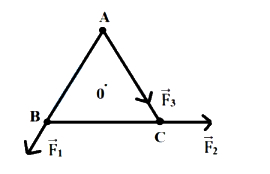
The figure shows three forces $\overrightarrow{F}_{1}, \overrightarrow{F}_{2}$ and $\overrightarrow{F}_{3}$ acting along the sides of an equilateral triangle. If the total torque acting at point $O$ (the center of the triangle) is zero,then the magnitude of $\overrightarrow{F}_{3}$ is:
A
$\frac{F_{1}-F_{2}}{2}$
B
$F_{1}-F_{2}$
C
$F_{1}+F_{2}$
D
$\frac{F_{1}}{F_{2}}$
Solution
(C) Let the perpendicular distance from the center $O$ to each side of the equilateral triangle be $r$.
The torque $\tau$ due to a force $F$ is given by $\tau = F \cdot r$,where $r$ is the perpendicular distance from the axis of rotation to the line of action of the force.
Looking at the directions of the forces in the figure,the forces $\overrightarrow{F}_{1}$ and $\overrightarrow{F}_{2}$ create a torque in the same rotational sense (e.g.,clockwise) about point $O$,while $\overrightarrow{F}_{3}$ creates a torque in the opposite sense (e.g.,counter-clockwise).
For the total torque about point $O$ to be zero,the sum of the torques must be zero:
$\tau_{1} + \tau_{2} - \tau_{3} = 0$
$rF_{1} + rF_{2} - rF_{3} = 0$
Dividing by $r$ (since $r \neq 0$):
$F_{1} + F_{2} - F_{3} = 0$
$F_{3} = F_{1} + F_{2}$
The torque $\tau$ due to a force $F$ is given by $\tau = F \cdot r$,where $r$ is the perpendicular distance from the axis of rotation to the line of action of the force.
Looking at the directions of the forces in the figure,the forces $\overrightarrow{F}_{1}$ and $\overrightarrow{F}_{2}$ create a torque in the same rotational sense (e.g.,clockwise) about point $O$,while $\overrightarrow{F}_{3}$ creates a torque in the opposite sense (e.g.,counter-clockwise).
For the total torque about point $O$ to be zero,the sum of the torques must be zero:
$\tau_{1} + \tau_{2} - \tau_{3} = 0$
$rF_{1} + rF_{2} - rF_{3} = 0$
Dividing by $r$ (since $r \neq 0$):
$F_{1} + F_{2} - F_{3} = 0$
$F_{3} = F_{1} + F_{2}$
0 likes
View Solution89
EasyMCQ
$A$ couple produces
A
no motion
B
linear and rotational motion
C
purely rotational motion
D
purely linear motion
Solution
(C) couple is defined as a pair of two equal and opposite forces acting at a certain distance from each other.
Since the two forces are equal in magnitude and opposite in direction,their vector sum (net force) is zero,which means there is no linear (translatory) acceleration.
However,because the forces act at different points,they create a torque about any point,which causes the body to rotate.
Therefore,a couple produces purely rotational motion.
Since the two forces are equal in magnitude and opposite in direction,their vector sum (net force) is zero,which means there is no linear (translatory) acceleration.
However,because the forces act at different points,they create a torque about any point,which causes the body to rotate.
Therefore,a couple produces purely rotational motion.
0 likes
View Solution90
EasyMCQ
If $\vec{F} = (5 \hat{i} - 10 \hat{j}) \text{ N}$ and $\vec{r} = (4 \hat{i} - 3 \hat{j}) \text{ m}$,then the torque $\vec{\tau}$ acting on the object will be:
A
$25 \hat{k} \text{ N m}$
B
$-25 \hat{k} \text{ N m}$
C
$15 \hat{k} \text{ N m}$
D
$-15 \hat{k} \text{ N m}$
Solution
(B) The torque $\vec{\tau}$ is given by the cross product of the position vector $\vec{r}$ and the force vector $\vec{F}$:
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = (4 \hat{i} - 3 \hat{j})$ and $\vec{F} = (5 \hat{i} - 10 \hat{j})$:
$\vec{\tau} = (4 \hat{i} - 3 \hat{j}) \times (5 \hat{i} - 10 \hat{j})$
Using the distributive property of the cross product:
$\vec{\tau} = 4 \hat{i} \times (5 \hat{i}) - 4 \hat{i} \times (10 \hat{j}) - 3 \hat{j} \times (5 \hat{i}) + 3 \hat{j} \times (10 \hat{j})$
Since $\hat{i} \times \hat{i} = 0$ and $\hat{j} \times \hat{j} = 0$,and knowing $\hat{i} \times \hat{j} = \hat{k}$ and $\hat{j} \times \hat{i} = -\hat{k}$:
$\vec{\tau} = 0 - 40(\hat{k}) - 15(-\hat{k}) + 0$
$\vec{\tau} = -40 \hat{k} + 15 \hat{k}$
$\vec{\tau} = -25 \hat{k} \text{ N m}$
$\vec{\tau} = \vec{r} \times \vec{F}$
Given $\vec{r} = (4 \hat{i} - 3 \hat{j})$ and $\vec{F} = (5 \hat{i} - 10 \hat{j})$:
$\vec{\tau} = (4 \hat{i} - 3 \hat{j}) \times (5 \hat{i} - 10 \hat{j})$
Using the distributive property of the cross product:
$\vec{\tau} = 4 \hat{i} \times (5 \hat{i}) - 4 \hat{i} \times (10 \hat{j}) - 3 \hat{j} \times (5 \hat{i}) + 3 \hat{j} \times (10 \hat{j})$
Since $\hat{i} \times \hat{i} = 0$ and $\hat{j} \times \hat{j} = 0$,and knowing $\hat{i} \times \hat{j} = \hat{k}$ and $\hat{j} \times \hat{i} = -\hat{k}$:
$\vec{\tau} = 0 - 40(\hat{k}) - 15(-\hat{k}) + 0$
$\vec{\tau} = -40 \hat{k} + 15 \hat{k}$
$\vec{\tau} = -25 \hat{k} \text{ N m}$
0 likes
View Solution91
EasyMCQ
$A$ door $1.2 \,m$ wide requires a force of $1 \,N$ to be applied perpendicularly at the free end to open or close it. The perpendicular force required at a point $0.2 \,m$ distant from the hinges for opening or closing the door is: (in $\,N$)
A
$2.4$
B
$3.6$
C
$6.0$
D
$1.2$
Solution
(C) The torque $\tau$ required to open or close the door remains constant.
According to the principle of moments, $\tau = r_1 \times F_1 = r_2 \times F_2$.
Given $r_1 = 1.2 \,m$, $F_1 = 1 \,N$, and $r_2 = 0.2 \,m$.
Substituting these values: $1.2 \,m \times 1 \,N = 0.2 \,m \times F_2$.
$F_2 = \frac{1.2}{0.2} \,N = 6 \,N$.
According to the principle of moments, $\tau = r_1 \times F_1 = r_2 \times F_2$.
Given $r_1 = 1.2 \,m$, $F_1 = 1 \,N$, and $r_2 = 0.2 \,m$.
Substituting these values: $1.2 \,m \times 1 \,N = 0.2 \,m \times F_2$.
$F_2 = \frac{1.2}{0.2} \,N = 6 \,N$.
0 likes
View Solution92
EasyMCQ
Let a force $\vec{F} = -F\hat{k}$ act on the origin of a Cartesian frame of reference. The moment of force about a point $(1, -1)$ will be
A
$-F(\hat{i} + \hat{j})$
B
$-F(\hat{i} - \hat{j})$
C
$F(\hat{i} - \hat{j})$
D
$F(\hat{i} + \hat{j})$
Solution
(A) The point $P$ is given as $(1, -1)$,so its position vector is $\vec{r}_P = \hat{i} - \hat{j}$.
Since the force acts at the origin $O(0, 0)$,the position vector of the point of application relative to point $P$ is $\vec{r} = \vec{r}_O - \vec{r}_P = 0 - (\hat{i} - \hat{j}) = -\hat{i} + \hat{j}$.
The torque (moment of force) about point $P$ is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
Substituting the values: $\vec{\tau} = (-\hat{i} + \hat{j}) \times (-F\hat{k})$.
Using the distributive property of cross product: $\vec{\tau} = F[(\hat{i} \times \hat{k}) - (\hat{j} \times \hat{k})]$.
Using the cross product relations $\hat{i} \times \hat{k} = -\hat{j}$ and $\hat{j} \times \hat{k} = \hat{i}$:
$\vec{\tau} = F[-\hat{j} - \hat{i}] = -F(\hat{i} + \hat{j})$.
Since the force acts at the origin $O(0, 0)$,the position vector of the point of application relative to point $P$ is $\vec{r} = \vec{r}_O - \vec{r}_P = 0 - (\hat{i} - \hat{j}) = -\hat{i} + \hat{j}$.
The torque (moment of force) about point $P$ is given by $\vec{\tau} = \vec{r} \times \vec{F}$.
Substituting the values: $\vec{\tau} = (-\hat{i} + \hat{j}) \times (-F\hat{k})$.
Using the distributive property of cross product: $\vec{\tau} = F[(\hat{i} \times \hat{k}) - (\hat{j} \times \hat{k})]$.
Using the cross product relations $\hat{i} \times \hat{k} = -\hat{j}$ and $\hat{j} \times \hat{k} = \hat{i}$:
$\vec{\tau} = F[-\hat{j} - \hat{i}] = -F(\hat{i} + \hat{j})$.
0 likes
View Solution93
EasyMCQ
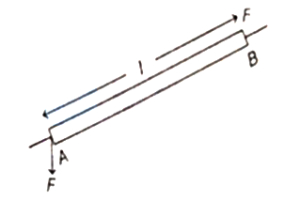
$A$ rod of length $l$ is acted upon by a couple as shown in the figure. The moment of the couple is $\tau \text{ Nm}$. If the force at each end of the rod is $F$,then the magnitude of each force is (given $\sin 30^{\circ} = \cos 60^{\circ} = 0.5$):
A
$\frac{\tau}{l}$
B
$\frac{l}{2 \tau}$
C
$\frac{2 \tau}{l}$
D
$\frac{2 l}{\tau}$
Solution
(C) The moment of a couple is given by the product of the magnitude of one of the forces and the perpendicular distance between the lines of action of the two forces.
Let the angle between the rod and the direction of the force be $\theta = 30^{\circ}$.
The perpendicular distance between the two parallel forces $F$ acting at the ends of the rod of length $l$ is $d = l \sin \theta$.
The moment of the couple $\tau$ is given by:
$\tau = F \times d = F \times l \sin 30^{\circ}$
Given $\sin 30^{\circ} = 0.5 = \frac{1}{2}$.
Substituting the values:
$\tau = F \times l \times \frac{1}{2}$
$\tau = \frac{F l}{2}$
Rearranging to solve for $F$:
$F = \frac{2 \tau}{l}$
Let the angle between the rod and the direction of the force be $\theta = 30^{\circ}$.
The perpendicular distance between the two parallel forces $F$ acting at the ends of the rod of length $l$ is $d = l \sin \theta$.
The moment of the couple $\tau$ is given by:
$\tau = F \times d = F \times l \sin 30^{\circ}$
Given $\sin 30^{\circ} = 0.5 = \frac{1}{2}$.
Substituting the values:
$\tau = F \times l \times \frac{1}{2}$
$\tau = \frac{F l}{2}$
Rearranging to solve for $F$:
$F = \frac{2 \tau}{l}$
0 likes
View Solution94
DifficultMCQ
$A$ force $\vec{F} = 5\hat{i} + 2\hat{j} - 5\hat{k}$ acts on a particle whose position vector is $\vec{r} = \hat{i} - 2\hat{j} + \hat{k}$. What is the torque about the origin?
A
$8\hat{i} + 10\hat{j} + 12\hat{k}$
B
$8\hat{i} + 10\hat{j} - 12\hat{k}$
C
$8\hat{i} - 10\hat{j} - 8\hat{k}$
D
$10\hat{i} - 10\hat{j} - \hat{k}$
Solution
(A) Given: $\vec{F} = 5\hat{i} + 2\hat{j} - 5\hat{k}$ and $\vec{r} = \hat{i} - 2\hat{j} + \hat{k}$.
Torque $\vec{\tau}$ is defined as the cross product of the position vector and the force vector: $\vec{\tau} = \vec{r} \times \vec{F}$.
Using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & -2 & 1 \\ 5 & 2 & -5 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}((-2)(-5) - (1)(2)) - \hat{j}((1)(-5) - (1)(5)) + \hat{k}((1)(2) - (-2)(5))$
$\vec{\tau} = \hat{i}(10 - 2) - \hat{j}(-5 - 5) + \hat{k}(2 + 10)$
$\vec{\tau} = 8\hat{i} - (-10)\hat{j} + 12\hat{k}$
$\vec{\tau} = 8\hat{i} + 10\hat{j} + 12\hat{k}$.
Torque $\vec{\tau}$ is defined as the cross product of the position vector and the force vector: $\vec{\tau} = \vec{r} \times \vec{F}$.
Using the determinant method:
$\vec{\tau} = \begin{vmatrix} \hat{i} & \hat{j} & \hat{k} \\ 1 & -2 & 1 \\ 5 & 2 & -5 \end{vmatrix}$
Expanding the determinant:
$\vec{\tau} = \hat{i}((-2)(-5) - (1)(2)) - \hat{j}((1)(-5) - (1)(5)) + \hat{k}((1)(2) - (-2)(5))$
$\vec{\tau} = \hat{i}(10 - 2) - \hat{j}(-5 - 5) + \hat{k}(2 + 10)$
$\vec{\tau} = 8\hat{i} - (-10)\hat{j} + 12\hat{k}$
$\vec{\tau} = 8\hat{i} + 10\hat{j} + 12\hat{k}$.
0 likes
View Solution95
EasyMCQ
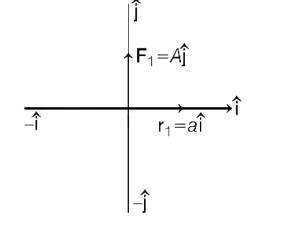
$A$ force $F_1 = A \hat{j}$ is applied to a point whose radius vector is $r_1 = a \hat{i}$,while a force $F_2 = B \hat{i}$ is applied to the point whose radius vector is $r_2 = b \hat{j}$. Both the radius vectors are determined relative to the origin of the coordinate axes $O$. The moment of the force relative to $O$ is
A
$(a A - b B) \hat{k}$
B
$(a A - b B) \hat{j}$
C
$(a b - A B) \hat{k}$
D
$(a B - b A) \hat{j}$
Solution
(A) Given that,
$F_1 = A \hat{j}, r_1 = a \hat{i}$
$F_2 = B \hat{i}, r_2 = b \hat{j}$
The moment of force (torque) is given by $\tau = r \times F$.
For the first force:
$\tau_1 = r_1 \times F_1 = (a \hat{i}) \times (A \hat{j}) = a A (\hat{i} \times \hat{j}) = a A \hat{k}$
For the second force:
$\tau_2 = r_2 \times F_2 = (b \hat{j}) \times (B \hat{i}) = b B (\hat{j} \times \hat{i}) = b B (-\hat{k}) = -b B \hat{k}$
The net moment relative to $O$ is:
$\tau = \tau_1 + \tau_2 = a A \hat{k} - b B \hat{k} = (a A - b B) \hat{k}$
$F_1 = A \hat{j}, r_1 = a \hat{i}$
$F_2 = B \hat{i}, r_2 = b \hat{j}$
The moment of force (torque) is given by $\tau = r \times F$.
For the first force:
$\tau_1 = r_1 \times F_1 = (a \hat{i}) \times (A \hat{j}) = a A (\hat{i} \times \hat{j}) = a A \hat{k}$
For the second force:
$\tau_2 = r_2 \times F_2 = (b \hat{j}) \times (B \hat{i}) = b B (\hat{j} \times \hat{i}) = b B (-\hat{k}) = -b B \hat{k}$
The net moment relative to $O$ is:
$\tau = \tau_1 + \tau_2 = a A \hat{k} - b B \hat{k} = (a A - b B) \hat{k}$
0 likes
View SolutionSystem of Particles and Rotational Motion — Torque and Couple · Frequently Asked Questions
1Are these System of Particles and Rotational Motion questions useful for JEE and NEET?
Yes. All questions in this section are mapped to JEE Main and NEET exam patterns. Previous year questions from JEE Main, NEET, GUJCET and state-level exams are included with full solutions.
2Can I switch to Hindi or Gujarati for these questions?
Yes. Use the language tabs in the hero section or the sidebar to view the same questions and solutions in English, Hindi or Gujarati.
3How do I generate a question paper from this subtopic?
Use the Vedclass Exam Paper Generator — select the chapter and subtopic, set difficulty, and generate Sets A, B, C, D automatically. First 3 chapters of every subject are free.
Vedclass Products
For Students
Vedclass Test Series
Mock tests in real JEE/NEET style with performance analysis. 5-day free trial.
Start Free TrialFor Teachers
Exam Paper Generator
Generate Set A/B/C/D papers from this chapter in 2 minutes. 3 chapters free.
Try FreeFor Institutes
Online Exam Module
Live online exams with unlimited students, 360° analytics & white-label branding.
See DemoFor Teachers & Institutes
Generate a System of Particles and Rotational Motion Exam Paper in 2 Minutes
Select subtopic & difficulty — Sets A, B, C, D auto-generated with No Repeat logic.
First 3 chapters of every subject are free — no payment required.